大坝内部变形监测智能机器人系统
发布时间:2021-10-21 16:51:00该技术核心成果已获得1项发明专利:一种管道测量机器人的标定方法、装置及系统。
▲技术原理
该技术是一种基于管道机器人的堆石体内部变形监测的新方法,其预先在坝体内部进行管道埋设,通过机器人对管道的三维曲线进行测量,估计出管道变形,通过管道中心线的变形推测出坝体内部的位移。该监测方法具有分布式特点,可沿管道连续测量,实现堆石体内部变形的更加精细的监测,并通过一套系统可同时解决水平位移和竖直沉降监测问题。
▲技术特点
(1)过去监测水坝是采用水管式沉降仪测垂直位移、引张线式水平位移计测水平位移,但是当供水线路较长时,水管式沉降仪容易造成管路堵塞,而引张线式水平位移计的铟钢丝容易断裂造成回弹,并且这两种传感器采用的是点式测量,而不是连续观测,无法得到内部的整体变形结果。大坝内部变形监测智能机器人系统,从根本上解决引张线式水平位移计、水管式沉降仪测量的缺陷与不足。
(2)大坝内部变形监测的实质就是精确测量并比对不同时期的变形监测管道的三维曲线。大坝内部管道布设完成后,可利用测量机器人定期对管道的三维曲线进行测量。测量机器人的行走轨迹即变形监测管道的三维几何曲线。该项目设计了一种新型的高精度管道测量机器人系统,集成高精度惯导和多个里程计,通过对多源观测数据进行最优融合,估计管道机器人的三维运动轨迹,进而得到变形监测管道的三维曲线。最后通过不同时期的三维曲线比对,计算大坝内部的水平、垂直和挠度变形指标。
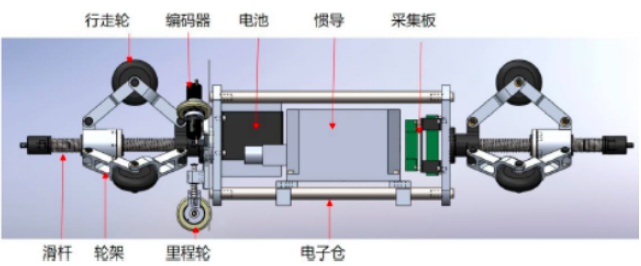
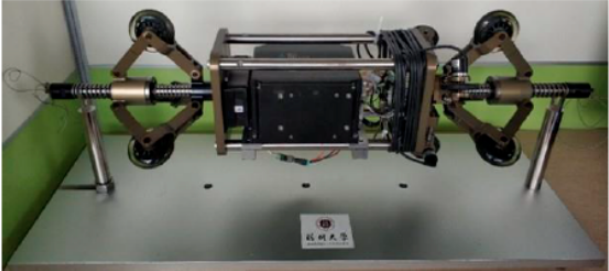
(3)变形监测机器人硬件系统设计。针对毫米级的管道三维曲线的测量需求,设计了一种全新的管道测量机器人。管道测量机器人的包括车架、测量单元和动力装置。其中车架采用强制对中设计,保证测量机器人的中轴线与管道中轴线一致。机器人的核心模块为高精度时间同步的测量单元,其是包括高精度惯导和里程计的集成系统。此外,还设计了一种实用的测量机器人标定装置,利用该装置可以对车体和惯导之间的安装角误差进行精确标定。
(4)综合GIS、BIM、数据挖掘、组合导航等技术优势,形成水利水电工程三维安全监测可视化平台,测量机器人作为一种集自动目标识别、自动照准、自动测角与测距、自动目标跟踪、自动记录于一体的测量平台。从数据采集、存储、管理、分析等角度出发,创造性地提出堆石坝内部变形监测新的方法与技术体系,形成硬软件自主研发的堆石坝内部变形监测机器人。
▲技术指标
现有系统具有应用于150米长度变形监测管道的性能。通过提高惯导的精度,可以进一步将管道监测长度提高至400~600米。
▲应用范围及前景
适用于心墙堆石坝内部变形监测工作。
案例:大坝内部变形监测智能机器人系统目前已经在贵州夹岩水利枢纽工程的大坝内部形变监测项目中投入运行。监测系统在运行过程中得到了较好的监测效果和一致好评。该设备相比于传统监测方法,监测精度更高,操作难度更小,运行成本更低,为大坝的正常运行提供了精确的数据支撑。在未来的发展过程中,监测系统将朝着减小设备体积,提高监测精度的方向发展。
▲持有单位信息