基于ROV的引水隧洞综合检测技术
发布时间:2021-10-21 16:56:00该技术已获得实用新型专利1项:一种应用三维图像声呐的有缆水下机器人配置方法。
▲技术原理
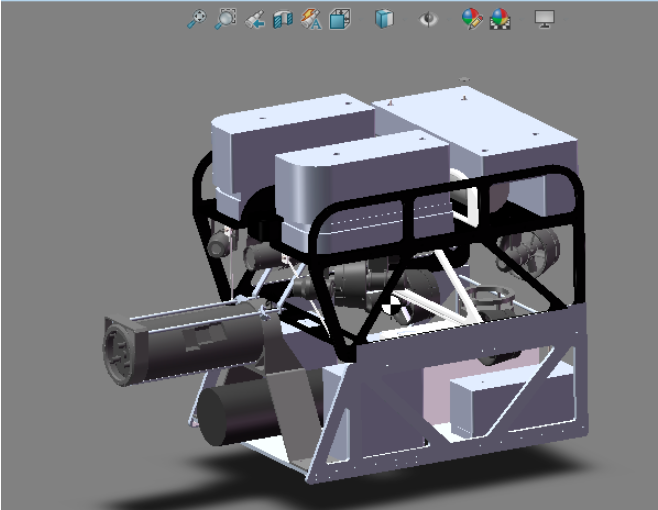
无人有缆潜水器(Remotely Operated Vehicle—ROV)又称水下机器人,可在水下环境中长时间作业。使用ROV 进行电站水下结构检测相对于潜水员下水检测作业,具有明显的优势。该技术的水下机器人主要包括 ROV 主机、地面控制系统和脐带缆三部分:ROV 主机标准配置包括深度计、姿态传感器、高清水下摄像头、水下照明、推进器等部件;地面控制系统包括控制系统、电源控制箱等。
▲技术特点
(1)原创性:基于近年海洋探测技术,以采用水下机器人(ROV)为主设备,引入VR技术辅助ROV操控及模拟作业。
(2)先进性:该技术实现检测单元模块化。实现水下机器人长距离供电,同时达成模块小型化,实现隧洞内衬砌表观缺陷的全覆盖检测与定量分析。
(3)前瞻性:该技术引入VR技术,将水工隧洞三维模型导入水下检测装备的操控及模拟系统。
▲技术指标
(1)适用水深:0~500米;
(2)隧洞长度:2000米以上;
(3)适用检测范围:引水隧洞(长隧洞);
(4)隧洞三维声呐成像:实现快速长距离隧洞内部结构点云数据采集成像,精细的水下点云数据;
(5)光学成像系统:光源可调、多自由度可控的云台。
▲应用范围及前景
适用于长距离输水隧洞水下工程检测,包括水利水电工程引水隧洞,调水工程引水隧洞、箱涵等,以及其他长距离水下隧洞。
案例1:四川雅砻江二滩水电站引水隧洞检查,检测三条“Z”型高水头、多弯段引水隧洞总长591.1m,最大水深100m。
案例2:四川雅砻江二滩引水洞、尾水洞水下检测作业,检测1#、4#两条引水隧洞,检查隧洞总长度为534.1m,检查最大水深约200m。
案例3:四川雅砻江锦屏二级水电站引水隧洞末端水下机器人检测作业,检测1#、2#、3#、4#四条引水隧洞自上游调压室井筒靠上游侧阻抗孔,向引水隧洞进水口方向2km长范围。
▲持有单位信息